|
IMPOSTAZIONE
DELLA STAZIONE BASE
Benchè
istallare la stazione sia veramente molto semplice,
deve, comunque, essere accertato ogni dettaglio.
Infatti, come e dove venga istallata la stazione e
l’antenna influenza il livello di prestazioni, che si
possono aspettare dal rilievo.
La
stazione base è una stazione fissa, normalmente
collocata in posizioni sicure, e può essere lasciata
lavorare in modo autonomo nella ricezione dei dati
mentre l’operatore procede nell’acquisizione dei
dati di campagna con l’unità mobile (rover).
·
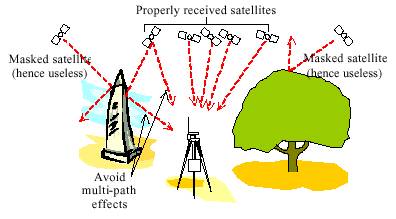
GPS ANTENNA: Vanno considerati i seguenti
due criteri quando si posiziona l’antenna, il primo ha
priorità sul secondo:
-
Per
una buona ricezione, scegliere un posto con una
piena visibilità all’orizzonte in tutte le
direzioni, e libero da ostacoli, che possono
provvocare effetti di multi-path. Inoltre, evitare
la presenza di antenne ad alto potenziale e di
trasmettitori radio vicini, oltre al trasmettitore
UHF della stazione.
Se,
comunque, il luogo prescelto non soddisfa il primo
criterio, è preferibile scegliere uin posto, che
soddisfi il primo creiterio … non essendo altrettanto
essenziale soddisfare il 2° criterio. In questo caso,
si può operare determinando la stazione con calcolo
della media di posizione per determinare la posizione.
N.B.
L’antenna è progettata per essere posta su un
adattatore posto su di un tricuspide, Risulta pertanto
facile e veloce il posizionamento su treppiede.
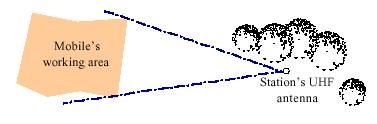
UHF ANTENNA: Al contrario dell’antenna
GPS, la posizione dell’antenna UHF non riveste
particolare importanza dal punto di vista operativo. In
questo senso, scegliere il collocamento dell’antenna
UHF risulta semplice. Si devono considerare solo due
criteri per assicurare la necessaria copertura del radio
link UHF:
L’antenna
UHF è progettata per essere montata sullo stesso
adattatore dell’antenna GPS. In quel caso, il luogo
scelto deve poter soddisfare i 4 criteri con ambedue le
antenne GPS e UHF praticamente sullo stesso punto.
La
presenza dell’antenna UHF nella vicinanza della GPS
non influenza quest’ultima se non per direzionalità.
L’antenna
UHF antenna ed il trasmettitore possono essere montati
anche separatamente. Un cavo opzionale, lungo 30-metri,
è proposto per istallare l’antenna/trasmettitore UHF
a distanza rilevante dalla stazione. Questo tipo di
posizionamento è consigliabile al limite di copertura
del UHF (l’antenna andrà posta il più in alto
possibile), o se si vuole allontanare l’antenna UHF
dalla antenna GPS, qualora le frequenze irraggiate dal
UHF producano un numero di onde armoniche in grado di
disturbare l’antenna GPS .
·
UNITÀ SCORPIO : Risulta rapido il
posizionamento sul treppiede con l’adattatore. Molte
posizioni di istallazione sul treppiede sono altresì
possibili.
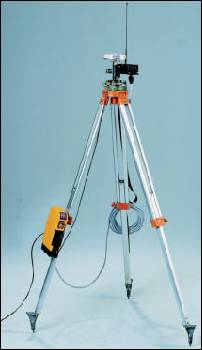
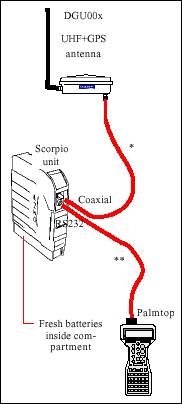
Stazione
Base SCORPIO
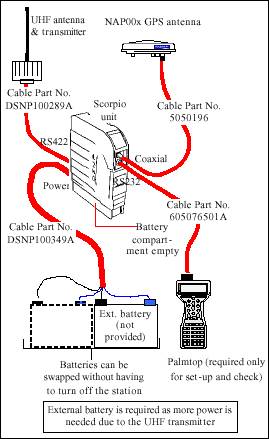
Connessioni
varie stazione SCORPIO
Impostazione
dell’unità mobile rover
Impostazioni
diverse per il trasporto della rover

Unità
rover SCORPIO - Configurazione
operativa
Connessioni
varie rover SCORPIO
Sessioni
operative equipaggiamenti scorpio
Una
sessione è semplicemente l’intervallo di tempo nel
quale si vuole che il ricevitore sia acceso ed
operativo. Nel tempo restante, l’equipaggiamento si
pone in modo standby. In uno Scorpio possono essere
programmate fino ad 8 sessioni diverse.
-
Così,
ogni equipaggiamento Scorpio, sia una stazione che
una rover, possono registrare i dati satellitari se
l’opzione PC card è presente.
Combinando
sessioni e memorizzazione dati è possibile: memorizzare
i dati con operazioni manuali (controllando inizio e
fine dell’archiviazione), o automaticamente nelle
sessioni.
Come
si può notare, le nozioni di sessioni e di
registrazione dei dati sono correlate strettamente.
Due
sono i modi possibili di accensione:
-
Accensione
Manuale: si detiene il controllo totale
dell’alimentazione dello Scorpio indipendentemente
dall’avvio delle sessioni, se ve ne sono.
-
Modo
Automatico: l’accensione dello Scorpio si trova
sotto il controllo delle sessioni programmate. Lo
Scorpio si accende automaticamente qualche minuto
prima dell’inizio della sessione e si spegne
subito dopo la fine della sessione.
In
pratica, si dovrà fare quanto segue, in rapporto alla
destinazione operativa dell’equipaggiamento:
-
Stazione,
in real-time: programmare le sessioni, scegliere se
la stazione debba accendersi e spegnersi
automaticamente e programmare i tempi (su base
giornaliera o no), così da permettere una
economizzazione delle batterie (questo modo
operativo richiede una scelta in modo Automatico
dell’accensione ).
-
Stazione,
in post-processing: stesso approccio che in tempo
reale per sessioni, eccetto che si dovrà
programmare la registrazione dei dati durante le
sessioni, come richiesto dal metodo di rilievo
usato. Ovviamente, in questo caso si richiede la
presenza dell’opzione PC card.
-
Rover,
in real-time: usare le sessioni non è di nessuna
utilità a priori.
-
Rover,
in post-processo: La funzione di registrazione dati
può essere attivata manualmente o attraverso
sessioni programmate.
Il
primo metodo è certamente molto più flessibile del
secondo.
L’opzione
PC card è sempre richiesta.
Tecniche
di rilievo topografico
-
Statico
-
Statico
veloce
-
Cinematico
STATICO
-
E'
il più preciso (<5mm + 1 ppm )
-
E'
il più lento ( > 1 ora di stazionamento )
-
E'
il più affidabile (difficilmente sbaglia)
-
E'
il più semplice (lavoro sul campo)
STATICO
VELOCE
-
Del
tutto simile allo statico con tempi di stazionamento
molto inferiori (5-30 min.) (richiede almeno 5
satelliti)
-
Possibile
grazie a SW e HW più potenti
-
Lo
statico "veramente veloce" si ottiene con
ricevitori a doppia frequenza o a doppia
costellazione.
-
-
Molte più informazioni rispetto alla singola
frequenza: L1, L2, L1+L2, L1-L2
-
-
Lo statico veloce in singola frequenza si affida
esclusivamente al SW
-
Stessa
semplicità dello statico
-
Stessa
precisione dello statico (?!?)
-
Stessa
affidabilità dello statico (?!?)
-
*A
livello matematico è tutto vero. In realtà la
precisione è di poco inferiore. L'affidabilità
dipende dalla sensibilità dell'operatore sul campo
(DOP, numero satelliti, rapporto segnale-rumore...)
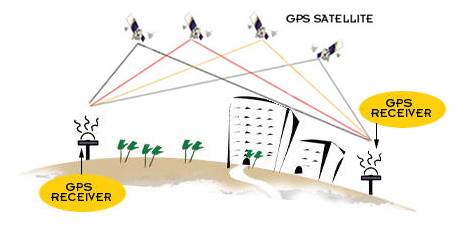
Stazione base GPS 1
Stazione base GPS 2
Per
le tipologie di rilievo statico e statico veloce si
adotta:
<<---
Stazione base installata su appropriato tricuspide
Stazione
base installata su appropriato tricuspide --->>
CINEMATICO
-
E'
il più veloce (solo 1 secondo per punto)
-
E'
il più difficile (non bisogna perdere il segnale
dai satelliti)
-
Dovrebbe
avere la stessa precisione dello statico ma rispetto
a questo è molto più influenzato dal DOP (si
ottengono circa 3-10 cm)
-
Richiede
l'INIZIALIZZAZIONE quando si inizia il rilievo e una
nuova inizializzazione ogni volta che si hanno meno
di 4 satelliti
-
Inizializzazione
con solo L1 ----
Statico
-
Inizializzazione
con L1+L2 ----
Statico, Statico Veloce, O.T.F. (On The Fly)
(al volo)
-
I
dati possono essere acquisiti in continuo movimento
(cinematico) o passando da un punto all'altro
fermandosi un istante (STOP and GO)
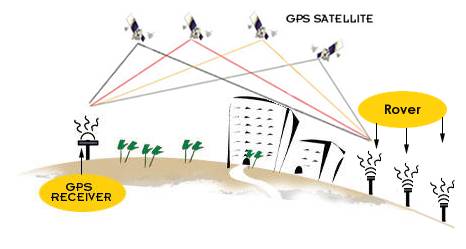
Stazione
base GPS
Unità mobile Rover


Per
le tipologie di rilievo cinematica si adotta:
<<---
Stazione base installate su appropriato tricuspide
Unità
mobile rover --->>
Il
sistema GPS munito di unità mobile “rover” permette
di effettuare rilievi sul territorio, sia in modalità
RTK che in post-processing. Con questo ricevitore il
sistema è in grado di eseguire autonomamente dei rilevi
di precisione e, qualora lo stesso venga munito di radio
modem, di eseguire picchettamenti o rilievi in tempo
reale in cui l'operatore conosce direttamente in
campagna le coordinate dei punti che sta rilevando.
Precisione
nei rilievi gps
La
maggior parte degli equipaggiamenti GPS funziona a
meraviglia, a meno che le condizioni di ricezione non
siano ideali. E' probabile che voi abbiate visto
caratteristiche come: "attendibilità del 99.9% per
ottenere una precisione di 2 ppm in meno di un
minuto", precisato poi con: "Tutti i criteri
per stabilire le prestazioni nel rilievo in tempo reale
sono in funzione del numero dei satelliti visibili,
degli ostacoli, della lunghezza della linea di base, del
multipath, della precisione delle coordinate della
Stazione di Riferimento e degli effetti
ambientali".
O
dichiarazioni quali: "La precisione dello Statico
Rapido dipende dal tempo di occupazione e delle
condizioni di osservazione". Naturalmente, il mondo
reale è inferiore al quasi perfetto 99.9% del tempo.
Ancorché problematici, gli errori GPS derivanti da
condizioni sfavorevoli possono essere difficili da
scoprire. Nella geodesia vecchio stile, i topografi
erano abituati a calibrare i loro strumenti. Con il GPS,
voi non potete calibrare il vostro strumento. Ed anche
se poteste, è possibile calibrarlo in condizioni
favorevoli e poi usarlo in condizioni sfavorevoli?
Inoltre,
spesso questi errori non si manifestano per molto tempo,
o addirittura mai. Per esempio, una stazione GPS di una
rete di monitoraggio terremoti può avere pochi
millimetri di errore in alcune condizioni, contaminando
così la ricerca per molti anni. Immaginate gli effetti
di errori simili nelle applicazioni di geodesia, GIS e
delle costruzioni!
Il
risultato è che quelle caratteristiche prestazionali
rimangono incontestate e molto difficili da confrontare.
E' quasi impossibile prevedere o anche scoprire delle
condizioni sfavorevoli, fino a che non è troppo tardi.
Perciò, noi dobbiamo essere in grado di ottenere buoni
risultati in condizioni sfavorevoli. Le caratteristiche
del ricevitore devono contenere informazioni su come
esso si comporta in condizioni sfavorevoli.
In
questa sezione noi discutiamo degli effetti ambientali
che incidono sfavorevolmente sulle prestazioni del GPS.
Presentiamo anche i metodi che noi usiamo per limitare i
loro effetti e per quantificare il livello di
attenuazione, in modo che voi possiate accuratamente
confrontare i nostri strumenti con gli altri. Nelle
sezioni seguenti riassumiamo i nostri risultati, giacché
noi continuiamo a migliorare lo stato dell'arte:
Effetto
Ambientale 1: Interferenza
Effetto
Ambientale 2: Multipath
Effetto
Ambientale 3: Ionosfera
Effetto
Ambientale 1: Interferenza
Questo
effetto è causato dai segnali provenienti da altre
sorgenti di radio frequenze. Esso può mascherare
totalmente i segnali GPS, o ridurre la loro forza
apparente (ovvero, ridurre il rapporto segnale/rumore
aggiungendo rumore). L'interferenza può determinare che
un ricevitore perfettamente funzionante smetta
completamente di lavorare. In casi meno gravi,
l'interferenza causa frequenti perdite di aggancio e
salti di ciclo, rendendo i dati inutilizzabili. Oppure,
può soltanto aumentare il rumore e diminuire
leggermente la precisione.
Con
la rapida espansione delle comunicazioni satellitari,
l'interferenza non è più limitata alle aree urbane.
Voi potete rilevare la presenza di segnali di
interferenza dalle frequenti perdite di aggancio e da
valori più bassi del rapporto segnale/rumore
visualizzati dal ricevitore.
L'equipaggiamento
GPS risolve questo problema con una superiore protezione
dall'interferenza, mediante l'individuazione e
l'eliminazione o la soppressione dei segnali di
interferenza. I ricevitori GPS ricevono anche in
condizioni di rapporto segnale/rumore basso, ad esempio
quando c'è una interferenza radio o quando c'è una
debole intensità del segnale (ad es.: sotto fogliame e
grondaie).
Effetto
Ambientale 2: Multipath
Il
multipath può rovinare la vostra giornata! Esso è
peggiore dell'interferenza, nel senso che l'interferenza
interrompe soprattutto la ricezione dei segnali dei
satelliti e voi non otterrete nessun risultato. Il
multipath invece vi darà risultati errati, senza che
voi lo sappiate. Per questo motivo, alcune persone
negano la sua esistenza.
Se
un ricevitore GPS non ha sufficiente protezione contro
il multipath ed il fabbricante dichiara una precisione
di 2 ppm in meno di uno minuto con una attendibilità
del 99.9%, allora l'attendibilità può facilmente
scendere allo 0% in presenza di multipath.
Finché
c'è qualche cosa sotto la vostra antenna, il che si
verifica nella generalità dei casi (il terreno che voi
state rilevando), voi avrete multipath. Giacché la
terra è un buon riflettore dei segnali GPS, i segnali
riflessi hanno pressoché la stessa intensità dei
segnali GPS diretti. La sola protezione che potete avere
contro questo tipo di multipath (che noi chiamiamo
"Multipath Terreno") sono le caratteristiche
di attenuazione del multipath della vostra antenna GPS.
Nessuna tecnica di elaborazione del segnale può avere
un qualsiasi effetto significativo su questo tipo di
multipath. Discuteremo più tardi gli altri tipi di
multipath in questa sezione.
Una
misura che quantifica la capacità di un'antenna di
mitigare il multipath terreno, viene chiamata rapporto
"sotto/sopra". Essa è il rapporto di guadagno
dell'antenna ad un certo angolo di depressione sotto
l'orizzonte rispetto al guadagno dell'antenna allo
stesso angolo di elevazione sopra l'orizzonte. Minore è
il rapporto, migliore è l'antenna. Questo rapporto è
uguale ad uno all'orizzonte ed ha il suo minimo
(migliore prestazione) allo zenit (verticale). Per
confrontare le antenne, noi usiamo il loro rapporto
"sotto/sopra" allo zenit.
Una
tipica antenna con piano di base piatto, ha un rapporto
"sotto/sopra" di -15dB. Questo rapporto per la
choke ring JPL (Jet Propulsion Laboratory) è di circa
-28 dB per la L1 e -28 dB per la L2. La nostra choke
ring a singola profondità ha un rapporto di -30 dB per
L1 e -35 dB per L2. La nostra choke ring a doppia
profondità ha un rapporto di -35 dB per L1 e -40 dB per
L2. Per mettere questi numeri in prospettiva: un
rapporto di -15 dB provoca circa 7 millimetri di errore
in fase portante e 30 centimetri in fase del codice. -25
dB provocano 3 millimetri di errore in fase portante e
10 centimetri in fase del codice. -35 dB provocano 1.5
millimetri di errore per la fase portante e 5 centimetri
in fase del codice.
Il
multipath terreno ha una caratteristica ciclica, in cui
gli errori multipath oscillano tra i valori positivi e
negativi dei numeri visti in precedenza. Il periodo di
questa oscillazione dipende dall'altezza dell'antenna.
Per un'altezza di due metri, il periodo è di circa 20
minuti. Minore è l'altezza dell'antenna, più lungo è
il periodo. Un'altra tecnica per ridurre l'effetto del
multipath terreno è quello di fermarsi sul sito per uno
o più cicli di multipath, in modo che la maggior parte
di esso venga eliminato con le operazioni di media. Se
sostate su un punto per un solo minuto non potete
beneficiare di questo effetto del calcolo della media.
Ecco perché le caratteristiche della vostra antenna
sono particolarmente importanti al fine delle
osservazioni brevi.
L'altro
tipo di multipath è quando il segnale riflesso proviene
da oggetti situati sopra l'antenna, come gli edifici. Se
tali oggetti sono lontani più di 10 metri dall'antenna,
noi possiamo mitigare il loro effetto in modo
sostanziale con la nostra nuova tecnica di elaborazione
del segnale (brevetto in corso di concessione). Le
caratteristiche dell'antenna non hanno grande peso nel
mitigare questo tipo di multipath, a parte una lieve
attenuazione a causa della loro ellitticità. Questo
effetto è dovuto al fatto che i segnali diretti hanno
polarizzazione destrorsa, mentre i segnali riflessi
hanno polarizzazione sinistrorsa.
Il
restante punto debole sull'attenuazione del multipath è
quando il segnale viene riflesso da oggetti posti al di
sopra dell'antenna e situati a meno di 10 metri. In casi
del genere i risultati possono essere errati anche di
qualche centimetro nelle osservazioni brevi. Con gli
strumenti che usano solo la fase del codice, l'errore può
arrivare anche a diversi metri. Per evitare ciò,
accertatevi di essere ad una distanza di almeno 10 metri
dagli oggetti riflettenti che sono al di sopra
dell'antenna.
Quei
ricevitori che non hanno una reale tecnica di
attenuazione del multipath mediante elaborazione del
segnale e si basano solo sulla fase del codice, possono
avere errori che superano i 10 metri nella modalità
differenziale (DGPS). Ciò è tipico di tutti i
ricevitori a basso costo.
Effetto
Ambientale 3: Ionosfera
La
ionosfera è un guscio di elettroni e di atomi e
molecole elettricamente carichi che circonda la terra. I
segnali GPS, come qualsiasi segnale elettromagnetico che
si propaga attraverso un mezzo ionizzato, sono
influenzati dalle caratteristiche della dispersione
non-lineare di questo mezzo, che provoca errori in
distanza. Gli errori in distanza causati dalla ionosfera
possono variare da meno di 5 metri a più di 150 metri a
seconda dell'attività solare, dell'ora del giorno e di
altri fattori.
La
ionosfera, in assenza della Disponibilità Selettiva
(SA), può essere la maggior sorgente di errori in
distanza per gli utenti GPS. La doppia frequenza può
rimediare completamente agli effetti della ionosfera.
Facendo misure su due frequenze assai distanziate ed
associandole, è possibile rimuovere del tutto gli
effetti della ionosfera.
L'inseguimento
del segnale L2 è più difficile per i civili, perché
il codice sulla L2 non è disponibile per uso pubblico,
ma è criptato (questa tecnica è detta Anti-Spoof o AS).
I fabbricanti di GPS hanno escogitato delle tecniche per
ricostruire il segnale L2 senza la conoscenza di questo
codice. Alcune di queste tecniche non possono funzionare
bene quando le attività della ionosfera superano alcuni
limiti. L'attività della ionosfera ha un ciclo di 11
anni ed è più evidente nelle regioni equatoriali.
Vantaggi nell'uso di sistemi GPS
-
RIDUZIONE
DEI TEMPI DI RILEVAMENTO IN MODALITÀ CINEMATICA.
-
RIDUZIONE
DEL PERSONALE TECNICO IMPIEGATO NELLE OPERAZIONI DI
CAMPAGNA (è ora possibile che una sola persona
esegua il rilievo con l’unità rover dopo aver
inizializzato la stazione base).
-
POSSIBILITÀ
DI ESEGUIRE RILIEVI TOPOGRAFICI NEL RAGGIO DI 15 KM.
TRA LA STAZIONE BASE E L’UNITÀ MOBILE ROVER.
-
STAZIONE
BASE COMPLETAMENTE AUTONOMA E NON SUSCETTIBILE DI
INTERFERENZE ATMOSFERICHE.
-
POSSIBILITÀ
DI OPERARE IN QUALSIASI FASCIA ORARIA DELLA
GIORNATA.
|